CN1318752A - 为一个无线终端获得导频相位偏置时延参数 - Google Patents
为一个无线终端获得导频相位偏置时延参数 Download PDFInfo
- Publication number
- CN1318752A CN1318752A CN01116899A CN01116899A CN1318752A CN 1318752 A CN1318752 A CN 1318752A CN 01116899 A CN01116899 A CN 01116899A CN 01116899 A CN01116899 A CN 01116899A CN 1318752 A CN1318752 A CN 1318752A
- Authority
- CN
- China
- Prior art keywords
- wireless terminal
- base station
- wireless
- phase offset
- gps
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images

Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/01—Satellite radio beacon positioning systems transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W64/00—Locating users or terminals or network equipment for network management purposes, e.g. mobility management
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S1/00—Beacons or beacon systems transmitting signals having a characteristic or characteristics capable of being detected by non-directional receivers and defining directions, positions, or position lines fixed relatively to the beacon transmitters; Receivers co-operating therewith
- G01S1/02—Beacons or beacon systems transmitting signals having a characteristic or characteristics capable of being detected by non-directional receivers and defining directions, positions, or position lines fixed relatively to the beacon transmitters; Receivers co-operating therewith using radio waves
- G01S1/022—Means for monitoring or calibrating
- G01S1/026—Means for monitoring or calibrating of associated receivers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/01—Satellite radio beacon positioning systems transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/03—Cooperating elements; Interaction or communication between different cooperating elements or between cooperating elements and receivers
- G01S19/05—Cooperating elements; Interaction or communication between different cooperating elements or between cooperating elements and receivers providing aiding data
- G01S19/06—Cooperating elements; Interaction or communication between different cooperating elements or between cooperating elements and receivers providing aiding data employing an initial estimate of the location of the receiver as aiding data or in generating aiding data
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
- G01S19/45—Determining position by combining measurements of signals from the satellite radio beacon positioning system with a supplementary measurement
- G01S19/46—Determining position by combining measurements of signals from the satellite radio beacon positioning system with a supplementary measurement the supplementary measurement being of a radio-wave signal type
Abstract
本发明为一种利用综合无线全球定位系统来获得导频相位偏置时延参数,以及对于发生的变化自适应调整该参数的方法。该方法不要求为校正建立一个特定系统,而且不要求专业技术队伍来执行声场校正。通过这种方法,可利用能无阻接收全球定位系统信号的无线终端来确定导频相位偏置时延参数的估计,这些参数估计接着用于刷新数据库中之前得到的参数。接着利用该估计的导频相位时延参数来校正应用于定位不能无阻接收GPS信号的无线终端的导频相位偏置测量。
Description
本发明一般涉及一种综合无线-全球定位系统,尤其涉及为一个综合无线-全球定位系统的无线终端获得和选择性利用导频相位偏置时延参数。
基于卫星的全球定位系统能为世界范围内的用户提供精确的3维位置信息。图1描绘了全球定位系统(GPS)10。GPS10包括多个卫星12-j以及至少一个GPS接收机14,其中j=1,2,...,n。每个卫星12-j以已知速度vj围绕地球运行,而且与其它卫星12-j之间间隔已知距离。每个卫星12-j发送一个全球位置信号11-j,信号11-j包括一个已知频率f的载波信号,它是利用与特定卫星12-j相关的一个唯一的伪随机噪声(PN-j)码和导航数据(ND-j)调制的。PN-j码包括一个唯一的PN码片序列,而导航数据ND-j包括一个卫星识别符、定时信息和轨道数据,如仰角αj和方位角φj。图2描绘了GPS信号11-j的一个典型的20ms帧,除了导航数据序列ND-j外,它还包括PN-j码的全部20个序列。
GPS接收机14包括用于接收GPS信号11-j的天线15,用于检测GPS信号11-j的多个相关器16-k,以及处理器17,其具有利用导航数据ND-j来定位的软件,其中k=1,2,…,m。GPS接收机14通过PN-j码检测GPS信号。检测GPS信号11-j涉及一个相关过程,其中利用相关器16-k在载频方面(dimension)和编码相位方面搜索PN-j码。这种相关过程实现为,调制到一个复制的载波信号上的相移复制的PN-j码与接收的GPS信号11-j实时相乘,其后是一个综合和转储过程。
在载频方面,GPS接收机14复制载波信号,以在GPS信号11-j到达GPS接收机时与其频率相称。然而,由于多普勒效应,GPS信号11-j到达GPS接收机14之前,GPS信号11-j传输的频率f要改变一个未知量Δfj。因此,每个GPS信号11-j在到达GPS接收机14时频率将为f+Δfj。为补偿多普勒效应,GPS接收机14在从f+Δfmin~f+Δfmax范围的频谱fspec上复制载波信号,直到复制的载波信号的频率与接收的GPS信号11-j的频率相称,其中Δfmin和Δfmax为当GPS信号11-j从卫星12-j传输到GPS接收机14时,由于多普勒效应GPS信号ll-j将经历的频率上的最小和最大改变,即,Δfmin≤Δfj≤Δfmax。
在编码相位方面,GPS接收机14复制与每个卫星12-j相关的唯一的PN-j码。复制的PN-j码的相位在编码相位频谱Rj(spec)上偏移,直到利用复制的PN-j码调制的复制载波信号,在任何程度上(if atall),与GPS接收机14接收的GPS信号11-j相关,在此每个编码相位频谱Rj(spec)包括相关PN-j码的每个可能相移。当相关器16-k检测到GPS信号11-j时,GPS接收机14从被检测到的GPS信号11-j中提取出导航数据ND-j,并利用该导航数据ND-j来为GPS接收机14定位。
通过测量将由无线终端接收的、从两个或多个卫星发出的GPS信号所需的时差,GPS使得地基接收机能够确定其位置。伪距离定义为这个时差乘光速。伪距离并不是真实距离,因为它包含由接收机时钟偏置引起的误差。为确定2D位置(纬度和经度),通常要求接收来自三个卫星的信号。为确定3D位置(纬度、经度和高度),要求接收来自四个或更多个卫星的信号。然而,这个先决条件不总是能满足,尤其是在卫星信号被直接阻挡,如无线终端位于建筑物内时。
目前GPS接收机正在被结合到不总是能保证空中视距明晰的无线电话或其它类型的移动通信设备中。在这种情况下,GPS接收机14接收的GPS信号11-j的信噪比一般地比GPS接收机14在空中视距明晰的情况下低得多,由此使得GPS接收机14更难检测GPS信号11-j。
综合无线-全球定位(WGP)系统被开发用来便于GPS接收机检测GPS信号11-j。通过减少用于搜索GPS信号11-j的相关器执行的综合数,WGP系统便于GPS信号11-j的检测。通过缩小要搜索的频率范围和编码相位范围可减少综合数。具体来说,WGP系统限定GPS信号11-j的搜索到特定频率,以及限定到一个小于编码相位频谱Rj(spec)的编码相位范围。
无线终端的位置也可根据从无线网络得到的信息来确定。这些信息一般地包括导频相位偏置(PPO)信号。PPO测量包含无线终端与BS之间的距离信息。导频相位偏置是对导频信号中的编码相位的测量。它包括无线终端与BS之间的距离加上对来自任何一个基站的所有导频相位偏置(PPO)都相同的一个偏差的信息。如果可得到来自两个BS的导频相位偏置测量,那么通过从一个导频相位偏置测量中减去另一个导频相位偏置测量,可利用这两个导频相位偏置测量来构成一个导频相位偏置测量。这种相减抵消了未知的常量,因此PPO测量就是从无线终端到一个BS的距离减去从无线终端到另一BS的距离。如果可得到三个以上的PPO测量,那么根据三角测量方案也可确定无线终端的2D位置。利用基于无线网络的信号来定位无线终端的一个问题在于,PPO的测量误差通常远大于基于卫星的导航系统的测量误差。另一问题在于,不是总能得到三个或更多个用于定位的测量值。
综合无线-全球定位(WGP)系统同时依靠于卫星导航系统和无线通信系统来定位无线终端。综合无线-全球定位系统同时组合来自无线网络和卫星导航系统的数据,以得到一个综合的位置解。通过同时组合来自全球定位系统和无线网络的信息,就能提高定位精度,同时避免至少需要三个测量值。
图3描绘了一种综合无线全球定位系统20,它包括WGP服务器22、多个基站23以及至少一个WGP客户24。WGP服务器22包括一个GPS接收机26,其天线27安装在一个空中视距清晰的已知固定位置。WGP服务器22能通过一个有线或无线接口与基站23通信。每个基站23位于一个已知位置,且为位于与该基站23相关的地理区域或小区25内的WGP客户提供通信服务,其中每个小区25的尺寸已知,而且可分成多个扇区。WGP客户24包括一个GPS接收机28,以及可能是一个诸如无线电话29的无线终端,而且一般地处于移动状态,或位于一个空中视距清晰或不清晰的未知位置。
图4为示意WGP系统20操作的流程图300。在步骤310,WGP服务器22利用其GPS接收机26通过GPS信号11-j检测到多个卫星12-j。WGP服务器22从每个被检测的卫星12-j得到下述信息:卫星12-j的身份,以及与被检测卫星12-j相关的频率fj、编码相位、仰角αj和方位角φj,其中仰角αj定义为从WGP服务器22或客户24到卫星12-j的视线与该视线在水平面上投影之间的夹角,而方位角φj定义为该视线在水平面上的投影与正北方向在水平面上的投影之间的夹角。参见图5,图5描绘了对应卫星12-j和WGP服务器22或客户24的仰角αj和方位角φj。
在步骤315,WGP服务器22从当前正与之通信的基站23或服务WGP客户24接收扇区信息,其中扇区信息指示WGP客户24当前所处的扇区。在步骤320,WGP服务器22根据服务基站的已知位置、与该服务基站相关的小区尺寸,以及WGP客户24当前所处的扇区来初步估计WGP客户的位置。在一个实施例中,WGP服务器22初步估计WGP客户24位于该扇区内的一个基准点,例如,扇区的近似中心点。在另一个实施例中,WGP服务器22利用已知的前向链路三角测量技术来初步估计WGP客户24的位置。
在步骤330,对于每个被检测的卫星12-j,WGP服务器22利用从被检测的GPS信号11-j得到的信息,预测基准点处的频率fj(r)以及编码相位搜索范围Rj(sect),该范围包括GPS信号11-j到达WGP客户24当前所处扇区内的任意位置时的所有可能编码相位。在步骤340,WGP服务器22发送一条搜索消息到服务基站23,在此该搜索消息包括,对于每个被检测的卫星12-j,相关PN-j码的有关信息,预测的频率fj(r),以及编码相位搜索范围Rj(sect)。
在步骤350,服务基站23发送该搜索消息到WGP客户24,而WGP客户24在步骤360开始并行搜索该搜索消息中指示的卫星12-j。具体来说,WGP客户24将利用其相关器,来同时搜索该搜索消息中所指示的、编码相位搜索范围Rj(sect)限制内的、预测频率fj(r)上的每个GPS信号11-j。
综合无线-全球定位系统的性能直接取决于从卫星和无线网络接收的信息质量和精度,即,伪距离、PPO等。然而不幸的是,这些测量通常有干扰,而且经常地包含相对大的偏差。尤其是无线网络测量信号频繁出现测量误差,而且大部分是偏差。这些偏差定义为在信号传输和处理期间产生的时延,而且通常随每个扇区、每个基站,以及使用的每种类型和模式的无线终端而异。精确地估计和校正这些时延对于综合无线-全球定位系统的成功运行很重要。
对于只涉及几个基站/无线终端的小型网络系统,可为GPS的每个基站和/或无线终端建立一个系统来校正时延。其中一种方案是单独测量每个无线终端、基站和多路径的各自时延。这个方案要求有一个装备精密和昂贵仪器的大量受训技术人员队伍来为每个基站的每个扇区中的每种无线终端测量时延。这个方案成本高、耗时,而且如果工作不十分细致的话,将导致性能很差。然而,为每个基站实际校正时延的过程对于涉及成百上千个基站和几十种不同类型无线终端的大规模商业网络系统来说是不可行的。
另一种方案是根据无线网络和卫星测量来估计网络时延参数。为此建立一个系统来估计和调整时延参数,接着存储这个信息到数据库中。一旦建立了时延参数的数据库,它就可帮助用来定位位置还未知的无线终端。对于无线终端/小区扇区对的时延参数估计一般地涉及下述步骤:
(1)将要被校正的无线终端放置在这样的位置,在该位置上,要校正的小区扇区的主天线波束方向无阻接收卫星信号和无线网络信号。该位置不应太远离基站以避免多路径影响;而且也不应太靠近基站,以避免出现无线终端可能被锁定到错误的信号峰值,而不是主信号峰值的问题。
(2)测量该位置以得到无线终端的精确坐标。如果基站天线的坐标还未知,应确定其坐标。无线终端的坐标应精确到几米或更小。商业差分GPS的定位精度一般地为1米或更小。
(3)采集大量的网络和卫星测量数据。为得到时延参数的未阻统计估计,应采集一百个以上的采样。
(4)根据无线终端和基站的已知位置,以及采集的网络和卫星测量,计算该时延参数。
(5)根据新的估计值调整或存储该时延参数到数据库中。该数据库为每种无线终端,以及为每个基站的每个小区扇区存储时延信息。
显然,上面提到的现有技术程序既成本高又耗时。它要求通过相同的程序来为每个基站校正每个扇区的每种无线终端。由于每次校正涉及的时间限制和成本,可得到的采样数相当有限,这又影响了所得结果的精度。此外,利用这种校正过程,网络内的硬件/软件将发生变化,而且无线终端可请求重复进行该校正过程。因此,上面提到的校正过程仅适用于仅有几个基站/无线终端的小型无线网络系统。而对于必须校正成百上千个基站和几十种不同无线终端的大规模商业网络系统,则不实用。
因此,需要一种自动获得综合无线-全球定位系统中的无线终端的PPO时延参数,以及此后选择性利用该PPO时延参数来定位不能无阻接收卫星信号的无线终端的方法。
一种综合无线-全球定位(WGP)系统根据卫星测量和无线网络测量确定无线终端的位置。这种识别位置的精度取决于无线网络的测量质量,而不利的是这种测量将包含诸如偏差的测量误差。偏差是由信号处理和传输期间发生的时延导致的。该时延随每个扇区/基站以及使用的每种无线终端型号而异。校正该偏差对于WGP系统的成功运作很重要。在本发明中,公开了一种利用WGP系统来自动确定导频相位偏置时延参数(偏差)以及对于发生的变化自适应调整该参数的方法。该方法不要求为校正建立一个特定系统,而且不要求专业技术队伍来执行声场校正。通过这种方法,可利用能无阻接收GPS信号的无线终端来得到导频相位偏置时延参数,以及接着在定位不能无阻接收GPS信号的无线终端时,利用该时延参数来校正导频相位偏置测量。
图1描绘了称为全球定位系统(GPS)的现有基于卫星的导航系统;
图2描绘了GPS信号的一个典型的20ms帧;
图3描绘了一种综合无线-全球定位系统;
图4描绘了示意图3的综合无线-全球定位系统操作的流程图;
图5示意了对应一个卫星和一个无线全球定位系统客户的仰角和方位角;以及
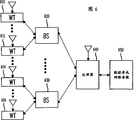
图6为根据本发明原理来估计时延参数,即综合无线全球定位系统的导频相位偏置时延参数的方框图。
如前所述,卫星导航系统,如全球定位系统,包括一组卫星,它们发送能被无线终端用来定位其位置的卫星信号。无线终端在地球上的位置是通过无线终端接收各个卫星发出的全球定位系统(GPS)信号所需时差确定的。为确定2D位置(纬度和经度)通常要求接收来自三个卫星的信号。为确定3D位置(纬度、经度和高度)通常要求接收来自四个或更多个卫星的信号。然而,这个先决条件不总是能满足,尤其是在卫星信号被阻挡而无法直接被无线终端接收时,如无线终端位于一个建筑物内时。也可利用来自无线网络的导频相位偏置(PPO)信息确定无线终端的位置。PPO是对导频信号中的编码相位的测量。它包括无线终端与基站之间的距离加上对来自任何一个基站的所有导频相位偏置测量都相同的一个恒定偏差的信息。如果可得到三个以上的PPO测量,那么无线终端的2D位置也可根据三角测量计算来确定。依靠基于无线网络的信号信号来定位无线终端的一个问题在于,PPO信号的测量误差通常远大于基于卫星的导航系统的测量误差。另一问题在于,不是总能得到三个或更多个测量值来确定一个无线终端的位置。
综合无线-全球定位系统依靠来自卫星系统和无线通信系统的信息来定位无线终端。通过同时组合来自GPS和无线网络的信息,就能提高定位精度,而且不必要求得到至少三个测量值。
不用说,WGP系统的性能直接取决于接收的卫星信号和无线网络测量的质量,如伪距离和导频相位偏置时延测量。这些无线网络测量有干扰,而且偏差大。尤其是无线网络测量通常包含测量误差,其中大部分为偏差。这些偏差是由信号传输和处理期间产生的时延导致的。这些时延随每个扇区/基站,以及使用的每种无线终端型号而异。精确地估计和校正这些时延对避免产生大的定位误差很有必要。
包括导频相位偏置(PPO)测量的无线网络测量存在误差,这些误差包括慢速变化和快速变化分量。由信号传输和处理时延引起的慢速变化分量通常表现为偏差。快速变化分量表现为噪声。偏差分量通常比噪声要大得多,应予以校正。而无法校正的噪声分量可通过其他技术消除,其中一种技术就是平均方法。
对于位于基站k的扇区j的无线终端i,导频相位偏置时延测量可表示为: 其中公式项中的上标‘ppo’指示它与导频相位偏置有关。下标“i”、“j”和“k”表示该项分别与基站k的扇区j中的无线终端i有关。另外,d为从该移动终端到基站的距离,c为光速,b为偏差测量,e为噪声测量,而a为对与该无线终端i有关的所有PPO测量都相同的一个未知常量。
公式1表明,导频相位偏置偏差测量yijk ppo包括从该移动终端到基站的距离dik(除以光束得到时间量)加上偏差bijk ppo、噪声eijk ppo和常量αi ppo。尽管通过平均技术可消除噪声eijk ppo,但通过平均技术无法消除偏差bijk ppo。偏差通常远大于噪声,必须被估计或予以校正。偏差b主要是由来自移动终端、基站以及可能来自路径的信号传输和处理中的硬件/软件时延引起的。由于存在未知常量appo,因此无法直接从PPO测量中得到偏差bppo的估计。取多个PPO测量的平均只会得出bppo加上appo的估计,而不会单独得到bppo。因此,得到bppo估计需要其它信息。用于估计bppo值的信息为无线终端定时偏差btime,它可由下式表示: 其中公式项中的上标‘time’表示该项与无线终端定时偏差btime有关,而dik为从该移动终端到基站的距离。尽管真实的定时偏差bij time还未知,但如果该无线终端能良好地接收GPS信号,则它可连同无线终端位置一起精确地估计。估计的定时偏差bijk time可表示为:
bij time=bij GPS+eij GPS(3)其中,bij GPS为根据GPS信息估计的时间偏差,而误差项eij GPS包括时间偏差估计中的误差。
参考图6,图6示意的方框图于为所处位置能无阻接收来自GPS卫星信号的无线终端确定导频相位偏置时延参数的估计值。这个参数用于确定所处位置不能无阻接收来自GPS卫星信号的无线终端位置。时延参数估计值的确定与应用该估计值来校正时延是并行执行的。对于商业无线网络来说,在由几十个基站(BS)620…630服务的整个网络内分布有成千上万个无线终端(WT)610、612、614、616。
一些无线终端能极佳地接收全球定位系统(GPS)信号和无线网络信号,而其他无线终端可能位于GPS信号被障碍物部分或完全阻塞的位置。对具有极佳GPS接收的无线终端来说,无需利用无线网络的时延参数来进行位置计算。利用直接从卫星接收的GPS信号所得到的精度对于每个固定位置通常好于10米。
在本发明中,来自能极佳接收GPS信号的终端的信息信号被馈入处理器640,处理器640提供无线网络的导频相位偏置时延参数估计,其输出用于用该时延参数来刷新数据库650。该估计参数接着用作不能无阻接收来自卫星的全球定位系统信号的无线终端的导频相位偏置时延参数,因此它需要利用相对于GPS信号的无线网络数据来为该无线终端定位。
为了替位于基站中一个特定小区扇区的每种特定的无线终端型号自动估计导频相位偏置时延参数,应采用满足下述条件的来自无线终端的所有测量:1)同一型号;2)由同一基站的同一小区扇区服务,以及3)能无阻接收GPS信号。第一个条件可通过检查该无线终端上报的设备序号来确定。每个终端都有一个唯一的设备序号,通过一个识别设备序号与无线终端型号的数据库可使设备序号与型号相联系。利用联系每个无线终端与一个伪随机号的软件可建立第二个条件。最后一个条件可通过确定无线终端检测的卫星数以及每个被检测卫星信号的信噪比来建立。根据公式(2)和(3),可得到: 上述公式中的最后两项可认为是零。平均噪声误差。因此,如果在一个公共基站的扇区j,具有无阻隔卫星信号接收的i型无线终端总数为Nij,那么估计的PPO时延可表示为下述公式: 其中
为从无线终端到基站的估计距离,而bij GPS为根据GPS信息的估计时间偏差。
无线终端与基站之间的估计距离
可根据从GPS得到的无线终端位置,以及从包含在数据库中的已知基站位置来确定。GPS的时间偏差bij GPS是根据无线终端从GPS卫星接收的信号得到的。当检测到一个GPS信号时,可确定复制码的相位,或最大化相关器输出的复制伪数量(pseudonumber)码的起始时间。卫星在发射时刻的时钟嵌入到无线终端接收的卫星信号中。从无线终端的最大相关复制码的起始时间中减去卫星时钟,接着将结果乘以光速将得到测量的伪距离。但由于在无线终端的时钟中存在时间偏差bij GPS,因此所得到的伪距离值将不是从无线终端到卫星的真实距离;它实际上是真实距离加上由无线时钟偏差导致的距离之和。
对于无阻接收GPS信号的无线终端,通常是从四个或更多个卫星得到伪距离测量,获得四个或更多个伪距离测量使得通过利用众所周知的GPS导航算法能确定包括三个未知坐标的无线终端的未知3D位置,以及终端时间偏差bij GPS。所得到的无线终端时间偏差为关系式(5)或(6)中使用的bij GPS值。
一旦得到位于一个公共扇区且能无阻接收卫星信号的同一型号的无线终端测量,根据表达式(5)或(6)将这些测量组合起来以得到估计的PPO时延参数。在此应注意,估计的PPO参数是直接从4个或更多个卫星以及无线终端的位置得到的,而且避免了现有技术的高成本、耗时程序。
在公式(5)或(6)中,导频相位偏置参数的估计是在组合大量测量采样后计算的。得到的采样数越大,结果也就越精确。该公式也可改变为估计导频相位偏置时延的其他形式。例如,如果我们想通过利用以前的估计值和一个新输入数据连续刷新导频相位偏置时延参数的估计,而不重新计算总和,那么也可应用下面的算法: 其中,(x1≥0,x2≥0,x1+x2=1)。
在表达式(7)中,
(m+1)和
(m)分别表示新刷新的估计和前一步骤m中的估计。可为值x1分配一个从0到1.0变化的值,而值x2可分配一个0和1.0之间变化的值,且假定x1+x2=1。x1与之前得到的PPO时延值相关,而x2与当前PPO时延值相关。因此,当x1相对x2较大时PPO时延参数将缓慢递增刷新,而当x1相对x2较小时PPO时延参数将快速刷新。
尽管本发明是根据当前优选的实施例描述的,但应理解,这些公开不应理解为限制。本领域的技术人员在读过上述说明后会很清楚各种替代方案和修正。由此,所附权利要求书可理解为覆盖属于本发明精神和范围的所有更新和改进。
Claims (18)
1.在用于确定无线终端位置的综合无线-全球定位系统中,一种用于确定导频相位偏置时延参数的方法,其特征在于,包括步骤:
根据从一个卫星接收的全球定位系统信号,确定位于基站的一个扇区内的第一无线终端的位置;
从一个数据库得到该基站的位置;
根据所得到的基站位置和第一无线终端的确定位置,确定第一无线终端与该基站之间的距离;
将第一无线终端与该基站之间的距离转换为一个时间d;
计算由于第一无线终端的时延,从卫星到第一无线终端的GPS信号中的时延b;以及
从时延b中减去时间d,以得到第一导频相位偏置时延参数。
2.根据权利要求1的方法,其特征在于,还包括步骤:
根据从一个卫星接收的全球定位系统信号,确定位于该基站该扇区内的第二无线终端的位置;
根据该基站和第二无线终端的位置,确定第二无线终端与该基站之间的距离;
将第二无线终端与该基站之间的距离转换为一个时间d;
计算由于第二无线终端的时延,从一个卫星到达第二无线终端的GPS信号的时延b;
从由于第二无线终端的时延而从卫星到达第二无线终端的GPS信号的时延b中,减去信号从第二无线终端到基站传输的时间d,以得到第二导频相位偏置时延参数。
将第一导频相位偏置时延参数与第二无线终端的第二导频相位偏置时延参数相加,以得到一个和值;以及
将该和除以相加的导频相位偏置时延参数数,以得到一个估计的导频相位偏置时延参数。
3.根据权利要求2的方法,其特征在于,还包括识别第一和第二无线终端的步骤。
4.根据权利要求3的方法,其特征在于,还包括步骤:将第一和第二无线终端与它们所处的基站和基站扇区相联系。
5.根据权利要求4的方法,其特征在于,还包括步骤:将第一和第二无线终端与型号相联系。
6.根据权利要求4的方法,其特征在于:第一和第二无线终端具有共同的操作特性,并且位于同一基站的一个公共扇区。
7.根据权利要求1的方法,其特征在于,还包括步骤:
将该无线终端与基站之间的距离除以光速,以得到信号从基站到该无线终端传输的时间d。
8.根据权利要求1的方法,其特征在于,计算时延b的步骤包括步骤:
得到从该无线终端到至少四个卫星的距离,用于确定三个未知变量值加上时延b。
9.根据权利要求8的方法,其特征在于,还包括步骤:
利用天文历表计算卫星的位置,用于确定三个未知变量值加上时延b。
10.根据权利要求9的方法,其特征在于,三个未知变量为该无线终端的x、y和z轴坐标值。
11.根据权利要求6的方法,其特征在于,第一和第二无线终端包括24个以上的无线终端。
12.根据权利要求6的方法,其特征在于,第一和第二无线终端包括48个以上的无线终端。
13.根据权利要求6的方法,其特征在于,第一和第二无线终端包括74个以上的无线终端。
14.根据权利要求6的方法,其特征在于,第一和第二无线终端包括99个以上的无线终端。
15.在综合无线-全球定位系统中,一种用于确定所处位置不能无阻接收卫星信号的无线终端的位置的方法,其特征在于步骤:
识别该无线终端,与该无线终端通信的基站和基站扇区,
识别该无线终端、基站和扇区后,为该无线终端分配一个导频相位偏置时延参数,以根据来自无线网络的信息确定该无线终端的位置。
16.根据权利要求15的方法,其特征在于,分配一个估计的导频相位偏置时延参数的步骤包括步骤:选择预先根据位于同一基站的同一扇区内、且所处位置能接收全球定位系统信号的类似无线终端确定的一个估计的导频相位偏置时延参数。
17.根据权利要求2的方法,其特征在于,还包括步骤:利用该估计的导频相位偏置时延参数作为所处位置不能无阻接收卫星信号的无线终端的时延参数。
18.根据权利要求17的方法,其特征在于,还包括步骤:利用从位于同一基站同一扇区的无线终端得到一个估计的导频相位偏置时延参数,且类似于所处位置不能无阻接收卫星信号的无线终端。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US09/552,898 US6636744B1 (en) | 2000-04-20 | 2000-04-20 | Obtaining pilot phase offset time delay parameter for a wireless terminal of an integrated wireless-global positioning system |
| US09/552,898 | 2000-04-20 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN1318752A true CN1318752A (zh) | 2001-10-24 |
Family
ID=24207267
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN01116899A Pending CN1318752A (zh) | 2000-04-20 | 2001-04-18 | 为一个无线终端获得导频相位偏置时延参数 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US6636744B1 (zh) |
| EP (1) | EP1148344A1 (zh) |
| JP (1) | JP2001356162A (zh) |
| KR (1) | KR20010098736A (zh) |
| CN (1) | CN1318752A (zh) |
| AU (1) | AU3522201A (zh) |
| BR (1) | BR0101425A (zh) |
| CA (1) | CA2338615A1 (zh) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN100401093C (zh) * | 2000-10-26 | 2008-07-09 | 高通股份有限公司 | 适用于混合定位系统确定误差估计的方法和装置 |
| CN100421526C (zh) * | 2005-12-20 | 2008-09-24 | 华为技术有限公司 | 用户终端上报位置信息的方法 |
| CN101023370B (zh) * | 2004-08-16 | 2011-01-26 | 索尼爱立信移动通讯股份有限公司 | 利用自适应搜索引擎获得gps信号的设备、方法 |
| CN111526577A (zh) * | 2019-02-01 | 2020-08-11 | 华为技术有限公司 | 一种时钟同步方法及设备 |
| CN111867040A (zh) * | 2019-04-30 | 2020-10-30 | 华为技术有限公司 | 一种通信方法、终端设备以及网络设备 |
| CN115642998A (zh) * | 2022-12-26 | 2023-01-24 | 浙大城市学院 | 一种毫米波频段联合通信与定位的导频分配方法 |
Families Citing this family (35)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7254402B2 (en) * | 2000-10-12 | 2007-08-07 | Qualcomm Incorporated | GPS satellite signal acquisition assistance system and method in a wireless communications network |
| US7574215B1 (en) * | 2000-11-06 | 2009-08-11 | Trimble Navigation Limited | System and method for distribution of GPS satellite information |
| US6865394B2 (en) * | 2001-01-31 | 2005-03-08 | Hitachi, Ltd | Location detection method, location detection system and location detection program |
| US20030103475A1 (en) * | 2001-07-09 | 2003-06-05 | Heppe Stephen B. | Two-way timing and calibration methods for time division multiple access radio networks |
| US8977284B2 (en) | 2001-10-04 | 2015-03-10 | Traxcell Technologies, LLC | Machine for providing a dynamic data base of geographic location information for a plurality of wireless devices and process for making same |
| US7623871B2 (en) * | 2002-04-24 | 2009-11-24 | Qualcomm Incorporated | Position determination for a wireless terminal in a hybrid position determination system |
| JP3644503B2 (ja) * | 2002-10-01 | 2005-04-27 | 日本電気株式会社 | 無線端末およびそのエンド間遅延制御方法とプログラム |
| US7660588B2 (en) | 2002-10-17 | 2010-02-09 | Qualcomm Incorporated | Method and apparatus for improving radio location accuracy with measurements |
| KR100477964B1 (ko) * | 2002-11-01 | 2005-03-23 | 서용철 | 지구 측위 위성 시스템의 평가 시스템 및 그 방법 |
| US8971913B2 (en) | 2003-06-27 | 2015-03-03 | Qualcomm Incorporated | Method and apparatus for wireless network hybrid positioning |
| US7047020B2 (en) * | 2003-07-16 | 2006-05-16 | Qualcomm Inc. | Assistance techniques for subscriber units having positioning capabilities |
| US7123928B2 (en) * | 2003-07-21 | 2006-10-17 | Qualcomm Incorporated | Method and apparatus for creating and using a base station almanac for position determination |
| FI20040261A0 (fi) * | 2004-02-18 | 2004-02-18 | Nokia Corp | Aikatiedon tarjoaminen |
| BRPI0418696A (pt) | 2004-04-02 | 2007-06-12 | Qualcomm Inc | métodos e equipamentos para sistemas de determinação de posição assistida por sinalizador |
| JP4254741B2 (ja) | 2005-04-27 | 2009-04-15 | セイコーエプソン株式会社 | 測位システム |
| US8331329B2 (en) * | 2006-10-06 | 2012-12-11 | Viasat, Inc. | Forward and reverse calibration for ground-based beamforming |
| US9559768B2 (en) * | 2007-05-25 | 2017-01-31 | Telefonaktiebolaget Lm Ericsson (Publ) | Same frequency satellite terrestrial radio broadcast |
| US8675680B2 (en) * | 2007-07-16 | 2014-03-18 | Sige Semiconductor, Inc. | Jurisdiction based parameter setting for wireless transceivers |
| US20090097452A1 (en) * | 2007-10-12 | 2009-04-16 | Qualcomm Incorporated | Femto cell synchronization and pilot search methodology |
| US8041375B2 (en) | 2007-10-31 | 2011-10-18 | Qualcomm Incorporated | Methods and apparatus for use in peer to peer communications devices and/or systems relating to rate scheduling, traffic scheduling, rate control, and/or power control |
| US8478228B2 (en) | 2008-10-20 | 2013-07-02 | Qualcomm Incorporated | Mobile receiver with location services capability |
| US20100192001A1 (en) * | 2009-01-29 | 2010-07-29 | Itron, Inc. | Device time adjustment for accurate data exchange |
| US8248268B2 (en) * | 2009-01-29 | 2012-08-21 | Itron, Inc. | Requested time adjustment for accurate data exchange |
| US8301931B2 (en) * | 2009-05-22 | 2012-10-30 | Itron, Inc. | Time synchronization of portable devices |
| US7994982B2 (en) * | 2009-06-12 | 2011-08-09 | Raytheon Company | Method and apparatus for bounded time delay estimation |
| US8600297B2 (en) | 2009-07-28 | 2013-12-03 | Qualcomm Incorporated | Method and system for femto cell self-timing and self-locating |
| CN102135623B (zh) * | 2011-03-23 | 2014-11-05 | 中兴通讯股份有限公司 | 移动终端和全球定位系统参数校准方法 |
| US8521184B2 (en) * | 2011-11-25 | 2013-08-27 | James Shen | Method for estimating the geographical latitude, longitude and elevation of a mobile electronic telecommunication device (TD) |
| CN102540229B (zh) * | 2011-12-31 | 2014-04-16 | 北京邮电大学 | 一种生命探测装置互定位方法及生命探测装置 |
| US8867368B2 (en) | 2012-09-05 | 2014-10-21 | Ciena Corporation | Systems and methods for noise tolerant signal processing in pilot assisted data receivers |
| US9699611B1 (en) * | 2016-01-04 | 2017-07-04 | Qualcomm Incorporated | Relative forward link calibration estimation |
| US10897686B2 (en) * | 2016-03-24 | 2021-01-19 | Qualcomm Incorporated | Determining a time calibration value for a user equipment |
| US10382883B2 (en) * | 2017-09-08 | 2019-08-13 | Netscout Systems, Inc. | Automatic calibration of geolocation analytic systems and operator network equipment parameters |
| CN109856646B (zh) * | 2018-12-24 | 2021-03-26 | 西安空间无线电技术研究所 | 一种高精度卫星导航信号间相对时延控制方法 |
| CN109991849B (zh) * | 2019-04-03 | 2022-05-24 | 哈尔滨理工大学 | 一种时滞lpv系统有记忆h∞输出反馈控制器设计方法 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5406275A (en) * | 1990-05-17 | 1995-04-11 | At/Comm Incorporated | Object location process and apparatus |
| US5717406A (en) | 1995-06-07 | 1998-02-10 | Sanconix Inc. | Enhanced position calculation |
| US6026304A (en) | 1997-01-08 | 2000-02-15 | U.S. Wireless Corporation | Radio transmitter location finding for wireless communication network services and management |
| US6108558A (en) * | 1998-04-21 | 2000-08-22 | Motorola, Inc. | Method for calculating a location of a remote Unit utilizing observed time difference (OTD) and real time difference (RTD) measurements. |
| US5982324A (en) * | 1998-05-14 | 1999-11-09 | Nortel Networks Corporation | Combining GPS with TOA/TDOA of cellular signals to locate terminal |
| US6252543B1 (en) * | 1998-05-28 | 2001-06-26 | Ericsson Inc. | Location system combining ranging measurements from GPS and cellular networks |
| US6204808B1 (en) * | 1998-08-13 | 2001-03-20 | Ericsson Inc. | Method and system for aiding GPS receivers via a cellular or PCS network |
| KR100303290B1 (ko) * | 1999-01-23 | 2001-09-26 | 윤종용 | 기지국과 이동 전화기간의 오차거리 및 거리 계산방법 |
| US6188354B1 (en) * | 1999-03-29 | 2001-02-13 | Qualcomm Incorporated | Method and apparatus for determining the location of a remote station in a CDMA communication network |
| US6289280B1 (en) * | 1999-12-10 | 2001-09-11 | Qualcomm Incorporated | Method and apparatus for determining an algebraic solution to GPS terrestrial hybrid location system equations |
-
2000
- 2000-04-20 US US09/552,898 patent/US6636744B1/en not_active Expired - Lifetime
- 2000-11-06 EP EP00309825A patent/EP1148344A1/en not_active Ceased
-
2001
- 2001-02-27 CA CA002338615A patent/CA2338615A1/en not_active Abandoned
- 2001-04-09 BR BR0101425-0A patent/BR0101425A/pt not_active Application Discontinuation
- 2001-04-16 JP JP2001116629A patent/JP2001356162A/ja active Pending
- 2001-04-17 AU AU35222/01A patent/AU3522201A/en not_active Abandoned
- 2001-04-18 CN CN01116899A patent/CN1318752A/zh active Pending
- 2001-04-19 KR KR1020010021081A patent/KR20010098736A/ko not_active Application Discontinuation
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN100401093C (zh) * | 2000-10-26 | 2008-07-09 | 高通股份有限公司 | 适用于混合定位系统确定误差估计的方法和装置 |
| CN101023370B (zh) * | 2004-08-16 | 2011-01-26 | 索尼爱立信移动通讯股份有限公司 | 利用自适应搜索引擎获得gps信号的设备、方法 |
| CN100421526C (zh) * | 2005-12-20 | 2008-09-24 | 华为技术有限公司 | 用户终端上报位置信息的方法 |
| CN111526577A (zh) * | 2019-02-01 | 2020-08-11 | 华为技术有限公司 | 一种时钟同步方法及设备 |
| CN111867040A (zh) * | 2019-04-30 | 2020-10-30 | 华为技术有限公司 | 一种通信方法、终端设备以及网络设备 |
| CN111867040B (zh) * | 2019-04-30 | 2021-12-28 | 华为技术有限公司 | 一种通信方法、终端设备以及网络设备 |
| CN115642998A (zh) * | 2022-12-26 | 2023-01-24 | 浙大城市学院 | 一种毫米波频段联合通信与定位的导频分配方法 |
| CN115642998B (zh) * | 2022-12-26 | 2023-03-28 | 浙大城市学院 | 一种毫米波频段联合通信与定位的导频分配方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20010098736A (ko) | 2001-11-08 |
| BR0101425A (pt) | 2001-11-20 |
| JP2001356162A (ja) | 2001-12-26 |
| EP1148344A1 (en) | 2001-10-24 |
| US6636744B1 (en) | 2003-10-21 |
| AU3522201A (en) | 2001-10-25 |
| CA2338615A1 (en) | 2001-10-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1318752A (zh) | 为一个无线终端获得导频相位偏置时延参数 | |
| US6420999B1 (en) | Method and apparatus for determining an error estimate in a hybrid position determination system | |
| CN1751248B (zh) | 无线移动通信网络内使用移动站确定基站位置参数 | |
| CN102209906B (zh) | 定位移动通信终端的方法和系统 | |
| US7383049B2 (en) | Automation of maintenance and improvement of location service parameters in a data base of a wireless mobile communication system | |
| US6570529B2 (en) | Autonomous calibration of a wireless-global positioning system | |
| US7663540B2 (en) | Server device, mobile terminal and positioning mode selecting method | |
| US6832090B2 (en) | System and method for identification of transmitters with limited information | |
| US20030125045A1 (en) | Creating and using base station almanac information in a wireless communication system having a position location capability | |
| AU2002239736A1 (en) | Method and apparatus for determining an error estimate in a hybrid position determination system | |
| US8629802B2 (en) | Method for the location of mobile terminals | |
| IL199138A (en) | Device and method for creating basic station information and using network information in wireless communication with the ability to locate | |
| JP2002006027A (ja) | 無線網グローバルポジショニング一体化(wgp)システムの無線端末に対する往復遅延時間(rtd)パラメータを得るための方法。 | |
| WO2001094968A1 (en) | Location procedure for mobile telephone units |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C06 | Publication | ||
| PB01 | Publication | ||
| C02 | Deemed withdrawal of patent application after publication (patent law 2001) | ||
| WD01 | Invention patent application deemed withdrawn after publication |